Nozzle Tip Calibration (Video Guide)
Nozzle tip calibration measures exactly how your nozzles rotate by measuring them with the bottom camera. This prevents placement error due to runout.
-
Select
Nozzle: N1from the dropdown underMachine Controls.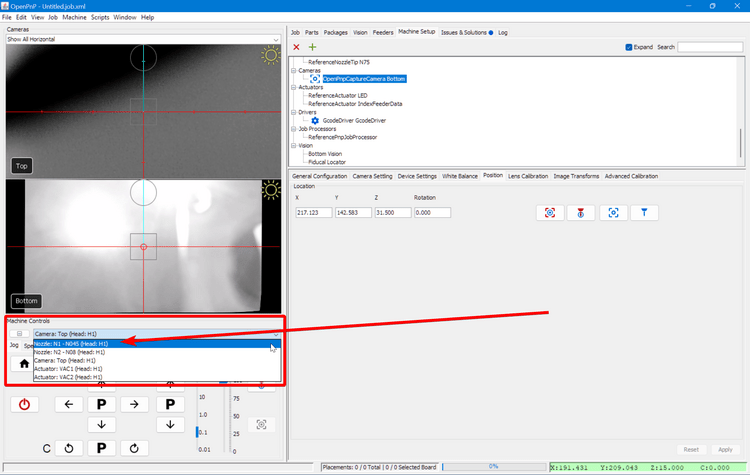
-
Navigate to
Machine Setup > Cameras > OpenPnPCaptureCamera Bottom.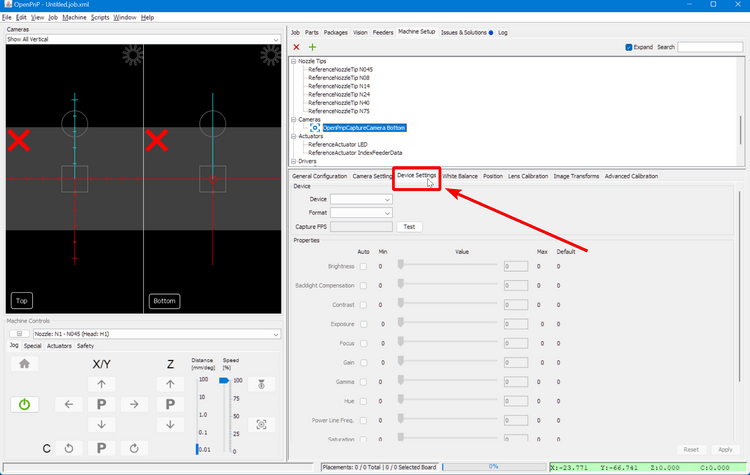
-
Go to the "Position" tab and click the "Position the tool over the center of the location" button.
-
Switch to the
Device Settingstab. Check, then uncheck the Exposure "Auto" checkbox to set the camera to manual exposure mode. -
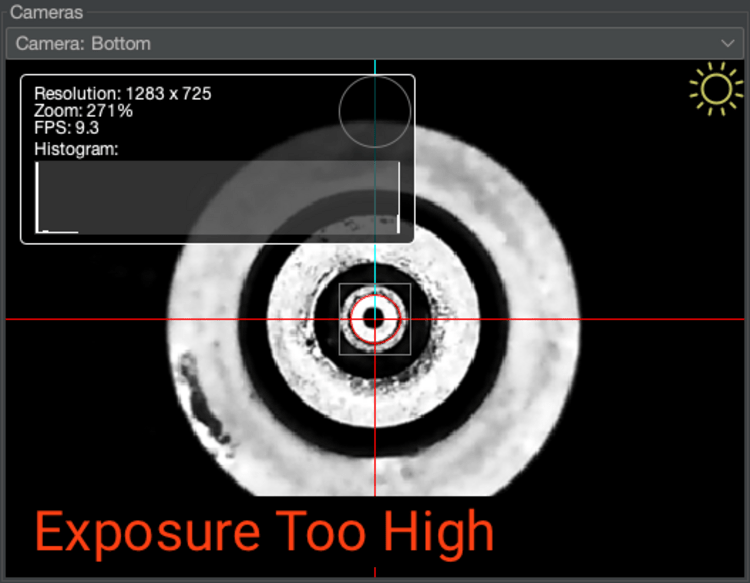
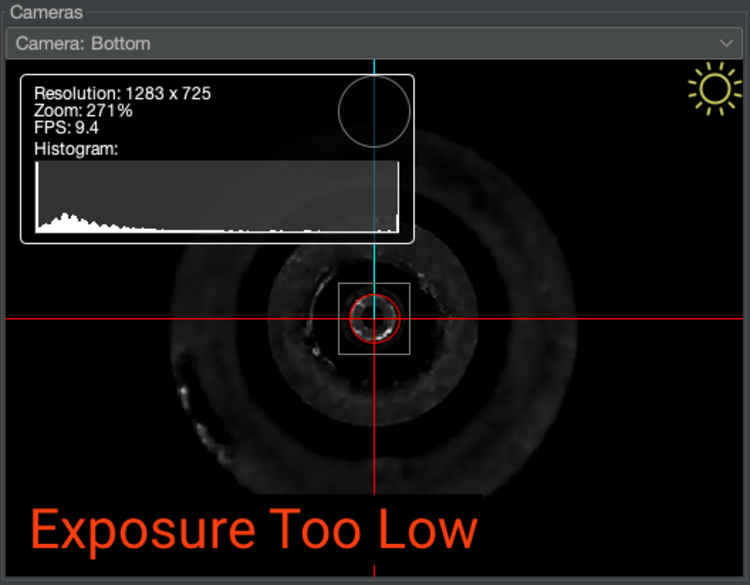
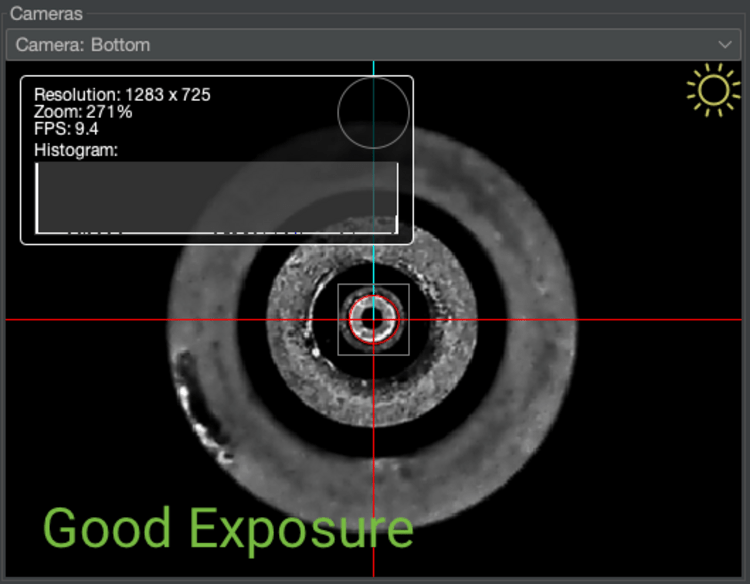
Adjust the bottom camera exposure. The bottom camera needs to be able to find the dark hole in the nozzle tip for calibration, but it can't be so bright that we have trouble differentiating between the tip and a part. Adjust the Exposure slider until the brightest parts of the image are at approximately half brightness. Use the images below as reference.
Other Camera Settings
We highly recommend not adjusting any of the other sliders for your camera's settings. Exposure is the only slider you should adjust from the default values the camera boots up with.
-
Navigate to
Machine Setup > Nozzle Tips > N045 > Calibration, and click theCalibratebutton.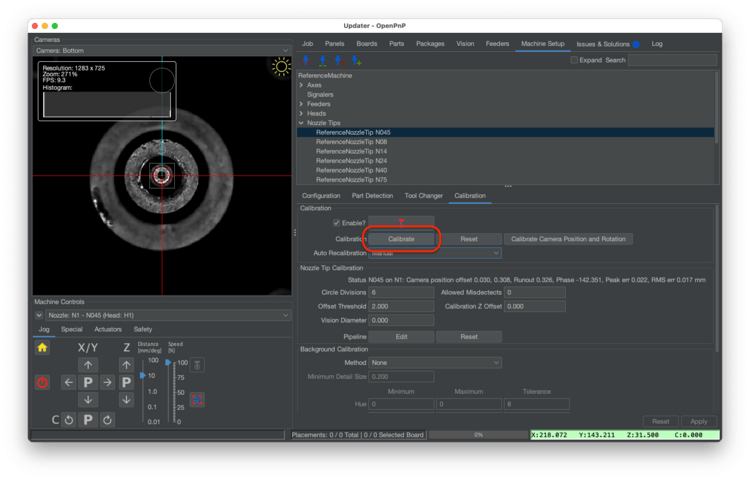
-
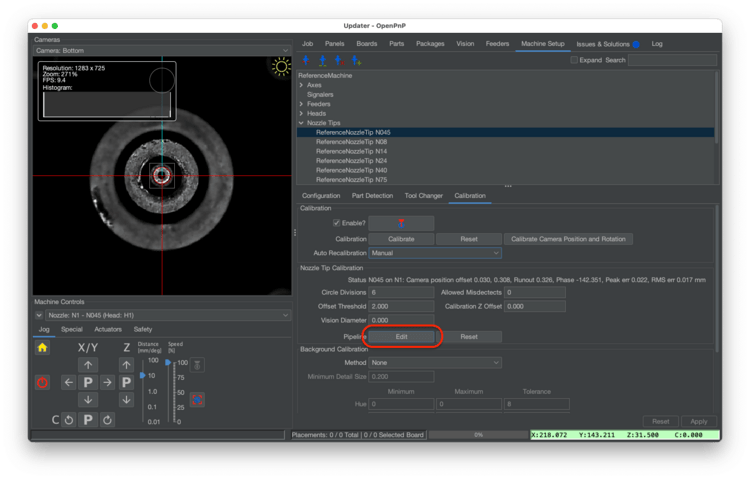
If calibration fails, click the Pipeline
Editbutton to adjust the nozzle tip vision pipeline, then retest.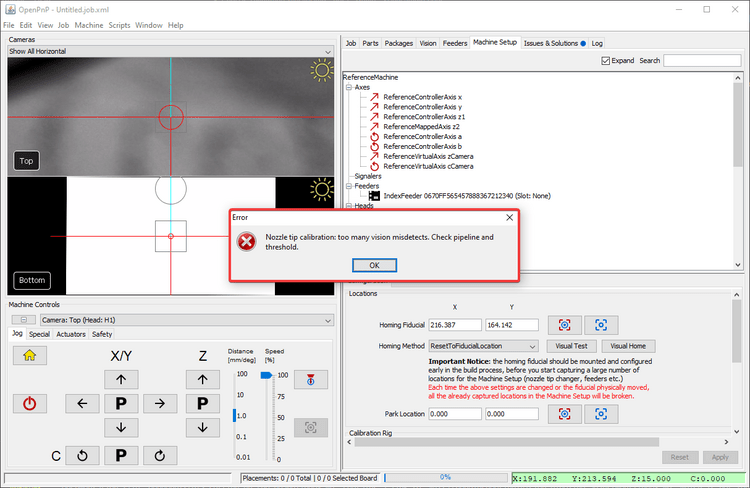
-
Once you've calibrated successfully, set
Auto RecalibrationfromManualtoNozzleTipChange. This will cause OpenPnP to calibrate any loaded N045 nozzle tips after homing, or after swapping tips. HitApplyto save your changes.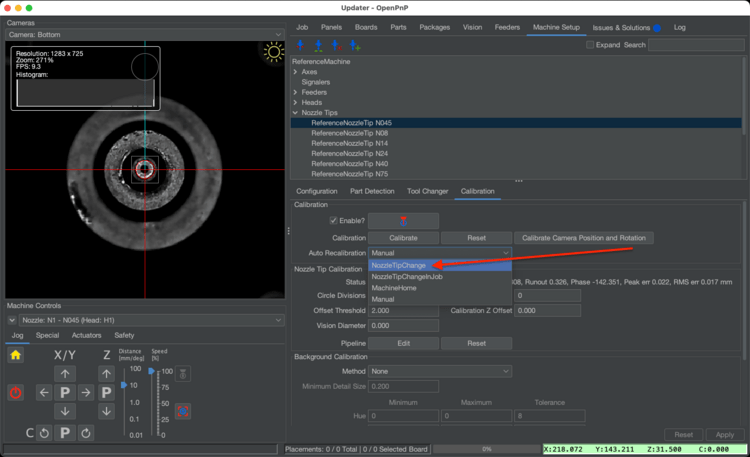
-
Repeat this section but instead using N2 and the N24 nozzle tip. If you need to change the exposure during this, be sure to test the N045 calibration again to make sure it works with the new exposure setting.
-
As a final check, home your LumenPnP again to ensure that homing fiducial detection and nozzle tip calibration finish successfully without errors.
-
After you've settled on an exposure setting, record the final exposure value for inputting when restarting OpenPnP as you did for the top camera.
Next is configuring the vacuum sensor.